
Robot op verkenningsmissie.
Intelligente robotsystemen worden steeds vaker ingezet in gebieden die getroffen zijn door grote rampen, waar reddings- en bergingswerk moet worden uitgevoerd en waar het voor mensen te gevaarlijk is om te komen. Robots die na een explosie, aardbeving of andere natuurcatastrofes naar overlevenden zoeken of beelden doorgeven vanuit ontoegankelijke plekken, zijn tegenwoordig van onschatbare waarde. Sterke EC-motoren van maxon zorgen voor de aandrijving van de Japanse reddingsrobot ”Quince”.
Robots die voor zoek- en reddingsacties ingezet worden, moeten zich extreem goed aan kunnen passen. Ze moeten klein zijn, niet te zwaar en wendbaar genoeg om in spleten of door nauwe doorgangen te kruipen. Bovendien mag moeilijk terrein geen hindernis voor ze zijn. Deze reddingsrobots dringen gebouwen binnen en gaan na of er gassen, straling of andere levensgevaarlijke bedreigingen zijn, voordat menselijke reddingsbrigades het terrein onderzoeken. Robot Quince heeft bewezen dat hij over deze eigenschappen beschikt. Na de zware aardbeving in Japan en de aansluitende nucleaire ramp in Fukushima kon Quince in juni 2011 de bovenste etage van de reactorruïne bereiken. Hij heeft hier radioactieve stralingsmetingen gedaan en stuurde HD-beelden naar de buitenwereld (zie QR-code). Daar waar de mensen niet konden komen, leverde de robot waardevolle informatie.
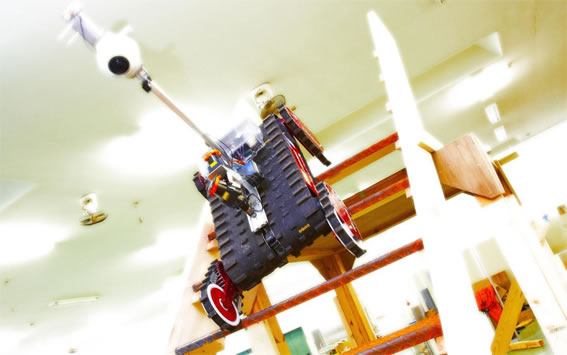
De 27 kilo zware Quince beschikt over vier beweegbare rupsaandrijvingen (flippers). Deze flippers passen de stand van de hoek automatisch aan de ondergrond aan – zowel op een steile trap als op onbegaanbaar terrein. Contact met de ondergrond is hierbij belangrijk. Dit wordt precies geanalyseerd door het verbruik van de flippers te meten. Bovendien meten PSD-sensoren (Position Sensitive Device) aan de voor- en achterste flippers de afstand tot de ondergrond. Naast de grijparm (zie afb. 2) kunnen op de robot ook twee laserscanners bevestigd worden, die de structuur van het terrein nauwkeurig kunnen registreren.
Bovenal is de snelle Quince – hij verplaatst zich met een snelheid van 1,6 m per seconde – met een ”Birds Eye Camera” uitgerust. De operator moet de robot weliswaar een richting op sturen, maar de optimale stand van de flippers – afhankelijk van het terrein dat hij moet oversteken – bepaalt de robot zelf. In de nieuwere versies van Quince is ook een apparaat ingebouwd dat radioactief stof of ultrafijne deeltjes kan verzamelen. Daarnaast zijn de robots met een 3D-scanner uitgerust. Om ervoor te zorgen dat er geen robots verdwijnen, is een verbinding met een draadloos netwerk mogelijk. Zo is besturing van de robots ook mogelijk als de verbindingskabel scheurt of afbreekt.
De reddingsrobot is ontwikkeld door Eiji Koyanagi, vice-directeur van het Chiba Institute of Technology Future Robotics Technology Center (fuRO). Koyanagi begon zijn loopbaan als leraar – hij werd professor toen hij 51 jaar was. Quince werkt voornamelijk in gebieden die door rampen zijn getroffen. ”Bij de ontwikkeling van een robot moet eerst gedacht worden aan de taken die hij later moet uitvoeren. Dat is de grootste uitdaging”, zegt Koyanagi. Tot nu toe zijn acht Quince-robots gebouwd. Voordat de robot met zijn taken begint, moet zeker zijn dat alles 100 procent functioneert. Hiervoor worden uitgebreid proeven gedaan op het ruime testterrein “Disaster City” in College Station, Texas. Quince was de enige robot die het complete parcours op het terrein aankon (ter gelegenheid van een RoboCup-wedstrijd). Bij de voorbereidingen voor werkzaamheden in de kern van de kernreactor in Fukushima Daiichi moesten wijzigingen aan de robot aangebracht worden. ”De omstandigheden waar de robot in een kernreactor moet werken zijn extreem. Als we Quince onaangepast de reactor in hadden gestuurd, was dat waarschijnlijk het eind van Quince geweest”, licht Koyanagi toe. De robot moest een val van twee meter onbeschadigd kunnen overleven en moest bijna geheel onderhoudsvrij zijn.
Krachtige motoren voor elke hindernis
fuRO vereist betrouwbare aandrijvingen. De motoren moeten een hoog vermogen en rendement hebben, maar ze dienen ook klein en licht te zijn. maxon motoren voldoen aan deze eisen, verklaart Koyanagi. 6 krachtige maxon motoren verzorgen de aandrijving van de robot. De borstelloze EC-4pole 30 motoren leveren 200 W: twee van deze motoren zijn in de twee belangrijkste kettingen geïnstalleerd. Deze sterke 4-pole-units presteren optimaal, wanneer Quince zich over oneffen terrein manoeuvreert. Vier andere motoren (EC 22) drijven de flippers aan. De 3D-scanner van Quince wordt in de juiste positie gezet door een RE max 24. Dankzij de bijzondere wikkelingstechnologie en vierpolige magneten zijn de EC 4-pole aandrijvingen onverslaanbaar op het gebied van prestatie per volume- en gewichtseenheid. De motoren hebben geen restkoppel, een hoog rendement en een uitstekende regeldynamica. De metaalbehuizing verzekert bovendien een goede warmteafvoer en mechanische stabiliteit. Alle motoren van de kettingaandrijving worden gecombineerd met de planetaire overbrenging GP 32 HP (High Power) met MR-encoder. Deze overbrenging is volgens klantspecificatie aangepast: een grote kogellager en een sterkere motoras. Met dit krachtige pakket kan Quince probleemloos bijna elke hindernis aan.
© maxon motor ag




{kind=link}
{kind=link}
{kind=link}
{kind=link}