
Succesvol door open source.
De KUKA youBot is een kleine mobiele robot die is ontwikkeld als open source platform voor wetenschappelijk onderzoek en onderwijs. De robot bestaat uit een mobiel platform en een robotarm – deze componenten worden aangedreven door aandrijfsystemen van maxon.
Een robot stap voor stap iets leren en met anderen over de zelfgeschreven programma's discussiëren, is voor iedere robotica-student een fantastische uitdaging. Het Augsburgse bedrijf KUKA heeft de youBot-robot ontwikkeld om wetenschappelijk onderzoek en onderwijs op dit gebied te bevorderen. De mobiele manipulator, via Linux aangestuurd, heeft een vrij beweegbare basis en een robotmechanisme met vijf vrijheidsgraden. Twee jaar na marktintroductie geldt de KUKA als referentieplatform voor onderzoek en opleiding op het gebied van de mobiele manipulatie. KUKA, dat tot nu toe wereldwijd vooral bekend was als fabrikant van industriële robots, heeft met de youBot een open source platform voor robotica-onderzoek gecreëerd, waarmee wetenschappers, ontwikkelaars en robotica-studenten in staat zijn hun eigen besturings- en toepassingssoftware te schrijven: bijvoorbeeld voor het monteren van IKEA-tafels of het transporteren van kratten en onderdelen in de “fabriek van de toekomst”.
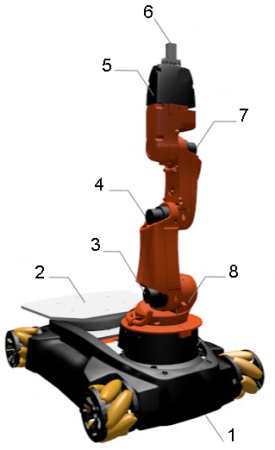
De KUKA youBot bestaat uit een omnidirectioneel verrijdbaar chassis en een of twee robotarmen, die op het chassis worden gemonteerd. In het chassis zijn een industriële pc en een accu geïntegreerd. De industriële pc communiceert in realtime (impuls van 1 ms) via EtherCAT met in totaal negen aandrijvingen, die kunnen worden gebruikt voor stroom-, snelheids- en positieregelingen. Robotplatform en arm kunnen ook onafhankelijk van elkaar worden gebruikt. Het youBot-chassis is slechts 53 cm lang, 36 cm breed en bijna 11 cm hoog, en beweegt zich voort op vier Mecanum-wielen. Dat zijn speciale wielen waarvan het loopvlak bestaat uit rollen die in een hoek van 45° over de wielomvang verdeeld zijn, waardoor de youBot zich kan bewegen in alle richtingen.
Op het platform is een circa 66 cm lange arm gemonteerd. Aan het uiteinde ervan bevindt zich een grijper met twee vingers, waarmee de robot voorwerpen met een grootte tot 70 mm en een gewicht tot 500 g kan verplaatsen. De robotarm bestaat uit vijf gewrichten, die door een aandrijfsysteem met motor-overbrenging-encoder-combinatie van maxon worden bewogen.
Speciaal ontwikkelde planetaire overbrengingen voor maximale bewegingsvrijheid
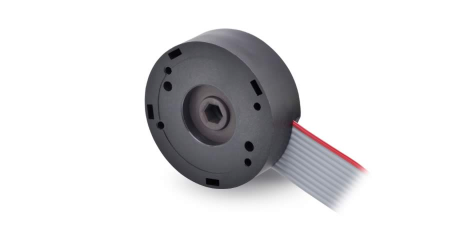
Omdat de beschikbare ruimte in de youBot beperkt is en er meerdere motoren en planetaire overbrengingen in arm en chassis moeten worden ondergebracht, zijn deze componenten direct in de gewrichten van de robotarm geïntegreerd. Hiervoor hebben maxon en KUKA samen een bijzonder lichte, nauwkeurige en robuuste overbrenging ontwikkeld, waarbij het gewricht om de planetaire overbrenging heen kan draaien.
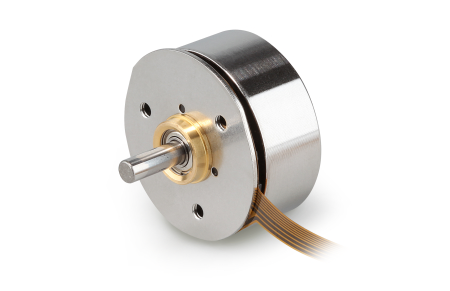
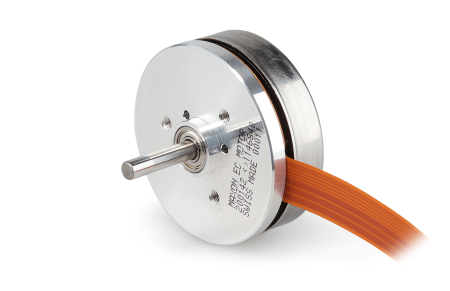
Voor de gewrichten van de robotarm zijn in totaal vijf borstelloze platte motoren gebruikt (maxon EC45 flat en maxon EC32 flat) in combinatie met speciale overbrengingen en encoders. Het platform wordt aangedreven met vier borstelloze platte motoren EC 45 van maxon. De borstelloze maxon EC 45 flat wordt gekenmerkt door een eenvoudige en compacte constructie met een hoge koppelstabiliteit. De platte motoren hebben een uitgaand vermogen van 15 tot 50 W, en wegen slechts tussen 46 g en 110 g. De gewrichten van de robotarm zijn verbonden met maxon encoders, om meting van de hoek van de gewrichten mogelijk te maken.
De KUKA youBot kan nu al worden beschouwd als mijlpaal in onderzoek en ontwikkeling op het gebied van de robotica. KUKA is hier bewust een nieuwe weg ingeslagen, om de onderzoek markt en robotica community aan te sporen technologie te delen. Want dankzij het op Linux gebaseerde open source concept van de robot zijn er voor de onderzoekers en wetenschappers geen beperkingen.
© maxon motor ag




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}